Courses
STEM Summer Research - King's College London Courses
You will earn 6 research credits over 6 weeks, conducting a faculty-supervised, hands-on, directed study research projects with results that will culminate in the preparation of a research paper. You will complete a minimum of 240 hours on research in and out of the laboratory.
Faculty mentors will work closely with you to direct your continued growth and knowledge development in the chosen research topic discipline.
- Make sure your courses transfer back for credit with your home school – this is your responsibility.
Choosing Your Research Project
- Review Project titles and descriptions below.
- List 3 (in order of preference) in your Academic Preferences Form, using KING as your course code.
- Program is highly individualized, with limited enrollment.
- You will need to complete a brief Literature Review in consultation with your research supervisor prior to departure before the start of the program. More details here.
- We encourage you to contact Arcadia Abroad Academic Advisors, Leah Cieniawa or Richard Evans II, to discuss your particular research interests further.
- Projects for Summer 2026 will be added to this page as they are made available
Biomedical Engineering at the School of Biomedical Engineering and Imaging Sciences (BMEIS) at King’s College London
| Course ID | Title | Credits | Syllabus |
|---|---|---|---|
| KING RSLW 392S | International Independent Research in STEM Fields | 6 |
Summer 2026 Research Projects
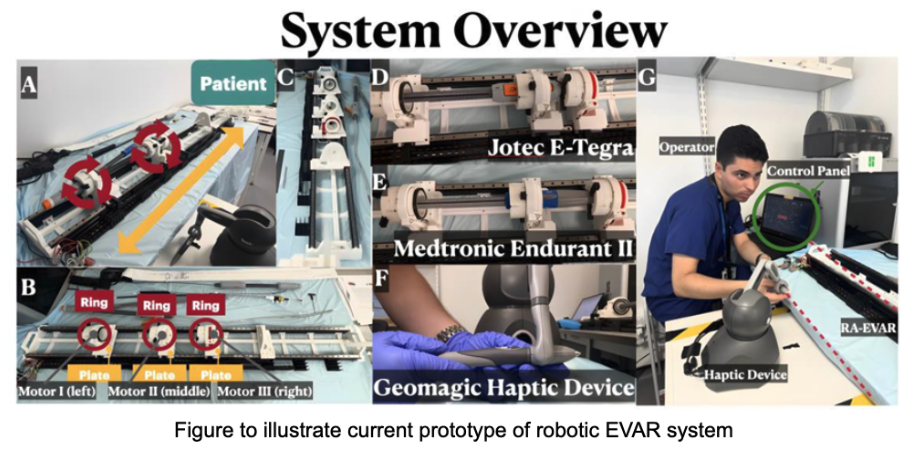
Development and evaluation of a robotic system for endovascular repair of aortic aneurysms
Supervisors: Dr Kawal Rhode, Dr Christos Bergeles, Xiaoyang Li
Aortic aneurysm is characterised by an abnormal bulging of the aorta in the abdominal (AAA) or thoracic (TAA) region. In the United States alone, approximately 10,000 deaths are attributed to AAAs annually. Therefore, prompt treatment is imperative, with interventional options including synthetic blood vessel replacement or endovascular aortic repair (EVAR). EVAR is often the first-line option due to its minimally invasive nature. In this procedure, a catheter is inserted into the femoral artery, guided to the aneurysm while carrying a stent graft, which is then deployed into place. However, EVAR is not devoid of complications, with misalignment of fenestrations being a notable issue. These misalignments can result in inadequate sealing and leaks, necessitating additional interventions. The increasing incidence of aortic aneurysms coupled with an aging population has resulted in an escalating demand. However, this demand surpasses the available healthcare capacity. This is partly due to the extensive training required and the complexity and long duration of these procedures. Therefore, there is scope to develop novel solutions in this field that will increase patient, staff, and healthcare system benefit for this disease.
The aim of this project is to develop a novel robotic system for endovascular aortic aneurysm repair, featuring innovative design elements to address the limitations of existing commercial systems. Specifically, we will focus on development of a robotic platform that employs a shared-autonomy paradigm. In this system, the surgeon guides the catheter carrying the stent graft to the aneurysm, while the robot precisely positions and aligns the stent graft. This shared-control system will be designed with a minimised size and lower cost. We will evaluate this system by simulating fenestrated EVAR on an anthropomorphic aorta phantom. The work will be extended to evaluate automation of the entire procedure, with minimal operator intervention.
Skills Developed: Knowledge, understanding and skills in abdominal aortic aneurysms, EVAR procedures, mechatronics systems, CAD, clinical evaluation of healthcare technologies, teamwork, and research methods.
Relevant Majors: Biomedical Engineering
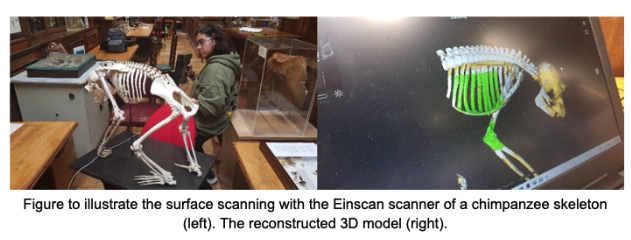
Repairing and reproducing skeletons using 3D printing
Supervisors: Dr Kawal Rhode, Dr Gillian Sales
The Life Sciences Museum at Guy’s Hospital hosts a diverse collection of animal skeletons. Many of these have become damaged or are incomplete. Furthermore, many are too fragile to allow handling by students for teaching and learning.
This project will involve using state-of-the-art technology to repair and reproduce a range of animal skeletons for the Museum. We will use the Einscan Einstar surface scanning system or computer tomography scanning to create 3D models of the skeletons. These will then be 3D printed using our range of additive manufacturing facilities at Guy’s and St. Thomas’ hospitals and ported to our online 3D viewing environment, King’s Virtual Anatomy & Histology. The models will be evaluated by our team of anatomists and used for teaching and learning in the School of Life Sciences and Medicine at King’s.
Skills Developed: Knowledge, understanding and skills in surface imaging, CT scanning, image processing, 3D computer models, additive manufacturing, CAD, teamwork, and research methods.
Relevant Majors: Biomedical Engineering
Development and evaluation of physical anatomical models for surgical simulation
Supervisors: Dr Kawal Rhode, Dr Antonia Pontiki, Steven Morris, Adharvan Gabbeta, Zixi Wang
Additive manufacturing, or 3D printing, has opened new possibilities for recreating human anatomy and physiology via high-fidelity anatomical models. These can be used for surgical training, procedure rehearsal, medical device testing, and education. Anatomical models present a more ethical and cost-effective alternative to cadavers or animal models.
The project will identify an area of need where anatomical models may be effective. We will use medical image data to create computer models of the target anatomy. These will then be manufactured using the knowhow and techniques that we have developed within the research team over the last 10 years. An evaluation study will be formulated to measure the effectiveness of the models in the target scenario. We cover an extensive range of organs, organ systems, and parts of the body – head and neck, brain, thorax, heart, lungs, limbs, hands, kidneys, prostate, reproductive system, vascular structures, etc.
Skills developed: Knowledge, understanding and skills in human anatomy, image segmentation, CAD, additive manufacturing, clinical evaluation of healthcare technologies, teamwork, and research methods.
Relevant Majors: Biomedical Engineering
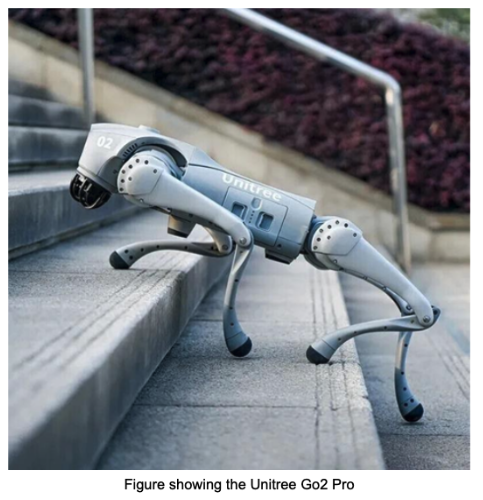
Development and evaluation of a radiation monitoring system using robotic quadrupeds
Supervisors: Dr Kawal Rhode, Glafkos Havariyoun
Hospital medical physicists routinely monitor radiation levels in areas such as X-ray rooms. This is to ensure safety for patients and staff. However, this does lead to radiation exposure to the medical physicists.
Robot systems, such as robotic arms and quadrupeds, have rapidly come down in price over the recent years and increased in sophistication. This project will employ the Unitree Go2 Pro quadruped and investigate its use in radiation monitoring in the hospital environment. We will work closely with the Medical Physics Departments at Guy’s & St. Thomas’ and King’s College Hospitals to design, construct and evaluate this solution.
Skills developed: Knowledge, understanding and skills in medical physics, medical radiation, CAD, additive manufacturing, mechatronics, computer programming, clinical evaluation of healthcare technologies, teamwork, and research methods.
Relevant Majors: Biomedical Engineering
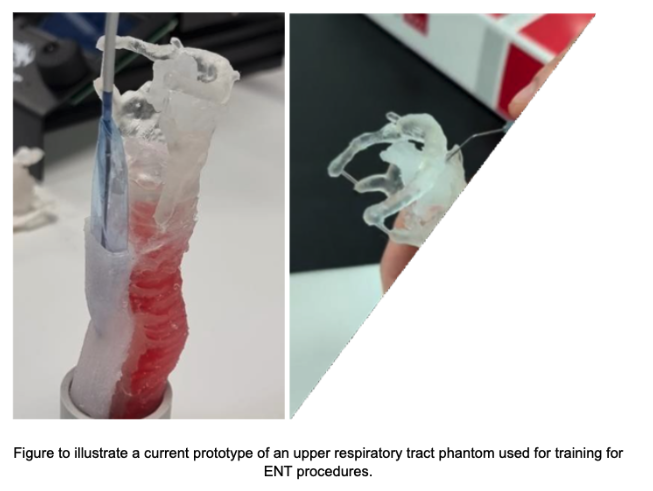
Development and evaluation of robotic system for treatment of vocal cord paralysis
Supervisors: Dr Kawal Rhode, Dr James Housden, Nuo Chen
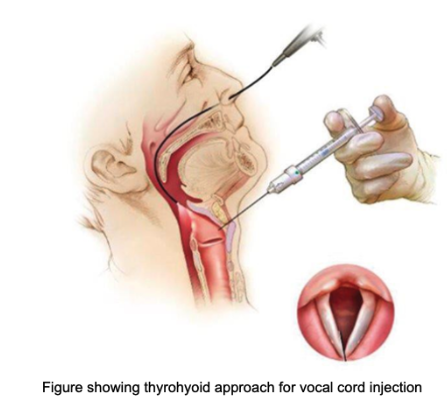
Vocal cord injections are a common, minimally invasive treatment for vocal cord paralysis used to improve voice quality, swallowing, and breathing by adding bulk to the paralyzed vocal cord, which allows the functioning cord to close the gap between them. The procedure is often performed in an office setting under local anaesthesia. When a vocal cord is paralyzed, it often sits too far to the side of the voice box, creating a gap when the person tries to speak or swallow. The injection "plumps up" the weakened/thin vocal cord, pushing it toward the middle (medialization) so the working vocal cord can make better contact. This improved closure results in a stronger, less breathy voice and can help prevent food or liquids from entering the airway (aspiration). Injections can be done in a clinic office under local anaesthesia or in an operating room under general anaesthesia. A flexible scope is inserted through the nose or a needle through the neck/mouth to guide the injection. The entire procedure is often quick (around 10-15 minutes).
This project aims to use one or more robotic arms and a robotic syringe to deliver the injections. We will also couple this to a robotic endoscope to guide the procedure. The project will work closely with our Ear, Nose, and Throat surgeons at Guy’s & St. Thomas’ hospitals to design, develop, and evaluate a first prototype.
Skills developed: Knowledge, understanding and skills in laryngology, CAD, additive manufacturing, mechatronics, computer programming, clinical evaluation of healthcare technologies, teamwork, and research methods.
Relevant Majors: Biomedical Engineering
A virtual reality museum for life sciences
Supervisors: Dr Kawal Rhode, Dr Gillian Sales, Elsa-Marie Otoo
The Museum of Life Sciences at Guy’s Campus holds a repository of CT scans of its specimens of animal skeletons. These scans can be viewed using a traditional DICOM image viewer. However, slice viewing is not intuitive unless the user has considerable expertise in anatomy.
We will convert the CT scans to a collection of 3D models using the image segmentation software, 3D Slicer. We will then use these models and the Blender/Unity environments to create a virtual museum with the Meta Quest 3 VR headset. An evaluation of the educational value of this collection will be conducted using visitors to the museum as subjects.
Skills developed: Knowledge, understanding and skills in comparative anatomy, CAD, 3D Slicer, Blender, Unity, computer programming, evaluation of technologies, teamwork, and research methods.
Relevant Majors: Biomedical Engineering

Development of an Epicardial Access Physical Simulator
Supervisors: Dr Antonia Pontiki, Dr Kawal Rhode, Adharvan Gabbeta
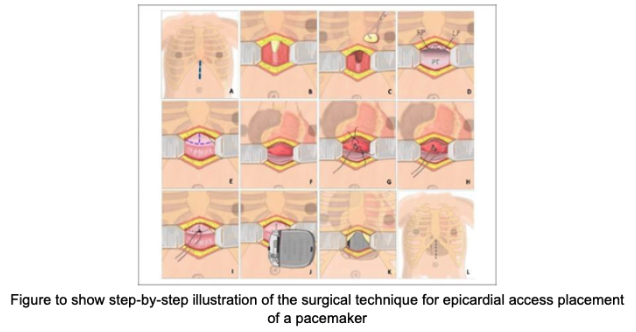
Epicardial pacemaker implantation is a critical but infrequently performed procedure, typically used in adult patients for whom transvenous pacing is not suitable due to venous obstruction, vascular malformations, prior surgeries, or high infection risk. Compared to paediatric cases, epicardial access in adults poses greater challenges, including restricted anatomical space, thoracic adhesions, comorbidities, and reduced opportunities for hands-on training.
This project aims to design and develop a high-fidelity, reusable simulator that replicates the thoracic anatomy and surgical environment of adult epicardial access procedures. Using medical imaging data, computer-aided design (CAD), and advanced manufacturing methods, the simulator will replicate the rib cage, pericardium, myocardium, and surrounding soft tissue with both structural and tactile realism. The simulator will provide a safe, cost-effective, and ethically sound alternative to cadaveric models, enhancing the training of cardiothoracic surgeons, improving operative skills and procedural confidence.
Aims:
- Design the anatomical components in CAD and image segmentation software, optimised for surgical access and modular assembly.
- Fabricate the simulator components using additive manufacturing (3D printing), and casting techniques.
- Recreate the layered anatomy of the thoracic cavity (rib cage, pericardium, heart, soft tissue, and outer skin) for realistic surgical dissection.
- Validate the simulator by gathering feedback from experienced cardiac surgeons on anatomical realism, usability, and training effectiveness.
Skills Developed: Understanding of cardiothoracic anatomy, with emphasis on epicardial access. Image segmentation of clinical imaging data and CAD. Advanced prototyping using additive manufacturing, moulding, and multi-material fabrication.
Relevant Majors: Biomedical Engineering
Development of novel X-ray test objects
Supervisors: Dr Kawal Rhode, Daniel Gebretensae
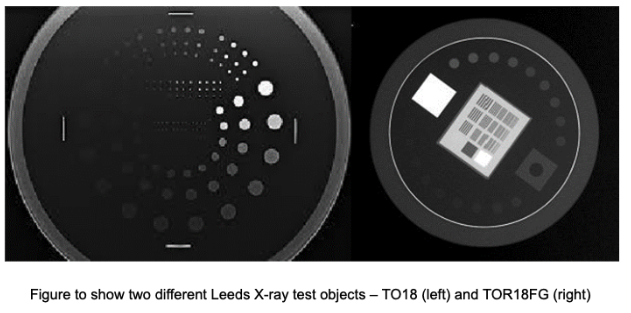
X-ray test objects are specialized devices used to calibrate and assess the performance of X-ray equipment. In medicine, they are called phantoms, such as the Leeds Test Objects phantoms, and are used to ensure safety and image quality for X-ray systems. Quality assurance: They are used for routine checks to ensure equipment, like X-ray systems, is working correctly and providing high- quality, safe images. Quantitative assessment: They allow for quick, quantitative measurements of performance metrics such as image contrast, spatial resolution, and low contrast sensitivity. Calibration: They help calibrate X-ray machines to ensure proper operating performance and can be used to set recommended exposure settings. These test objects are used by all healthcare facilities that have X-ray systems, but they are expensive.
We aim to design, construct, and evaluate a range of different X-ray test objects by direct 3D printing. We will use novel filaments, such as metal-doped PLA, to make phantoms that are compact and that reproduce the radiographic properties of standard test objects. We will evaluate the novel phantoms in partnership with several medical physics departments in the UK.
Skills Developed: Knowledge, understanding, and skills in X-ray physics, hospital medical physics, X- ray test objects, image acquisition, image analysis, CAD, additive manufacturing, computer programming, evaluation of healthcare technologies, teamwork, and research methods.
Relevant Majors: Biomedical Engineering
Grade Scale for the United Kingdom - AACRAO EDGE
The following information is vetted and provided by the American Association of Collegiate Registrars and Admissions Officers (AACRAO) on the Electronic Database for Global Education (EDGE).
| Percentage | Description | U.S. Equivalent |
| 70 – 100% | First Class | A |
| 60 – 69% | Second Class Upper | B+ |
| 50 – 59% | Second Class Lower | B |
| 40 – 49% | Third Class/Pass | C |
| 0 – 39% | Fail | F |